Agricultural robots (agribots) are no longer just hobby technologies—they can provide support for in-field labor-intensive tasks. Currently, basic field tasks such as transplanting, pruning, weeding, and harvesting are performed by hand for major horticultural crops (e.g., tomatoes, cucumbers, bell peppers, blueberries, pecans, etc.). Specialized labor is required because of the complexity and variability of specialty crop production environments. For example, harvesting activities depend on human labor because only ripe fruits are acceptable for market sales, which means that humans are needed to assess and harvest only the ripe fruits.
Related Content
In another example, mechanical weeding cannot be allowed to damage crops; therefore, human intervention is needed to remove only the weeds from the fields, without touching or damaging the crops. However, manual labor is becoming more expensive and difficult to find for farmers. To address this, agricultural ground robots are being developed to assist with tasks such as transplanting, harvesting, pruning, etc.
What are Agricultural Robots?
Agribots and unmanned ground vehicles (UGVs) are common terms for ground vehicles that perform autonomous or partially autonomous agricultural tasks without the interference of a human. To perform field tasks in different crops and under diverse environmental conditions (e.g., rainy/sunny days, daytime, nighttime, etc.), agribots have complex integrated systems.
In addition to standard hardware (e.g., frame, wheels/tracks, motors, etc.), these robots are equipped with vision sensors (cameras), operational systems, graphics processing units (GPUs), and GPS guidance systems. Agribots also include artificial intelligence (AI) features. This combination of processing, sensing, and AI enables the identification and recognition of plants, fruits, and other desired objects (weeds, animals, diseases, etc.) in fields with high precision and accuracy. All these features together have the potential to reduce human subjectivity and increase uniformity in performing daily field activities, such as differentiating ripe from unripe fruits, determining in-field plant health, etc.
Figure 1 provides a brief explanation of the systems in a typical agribot. Most agricultural robots are fully autonomous (self-driving). That is possible because of the embedded GPS and vision-guidance systems. These robots are equipped with RTK GPS, which means they have positional accuracy of less than an inch or a centimeter (~0.75 in.). According to the Society of Automobile Engineers (SAE), there are six levels of driving automation. Level 0 needs driving assistance (someone taking the controls), while level 5 is fully self-driving (no controller needed when operating).

How Can Agricultural Robots Be Helpful in Real-World Applications?
The main importance of agribots lies in reducing hand labor on farms by supporting laborious, dangerous, or time-consuming activities. Agribots can be equipped with specific implements to perform multiple field operations that require a human to drive a tractor or another machine (e.g., tilling, planting, spraying, and weeding).
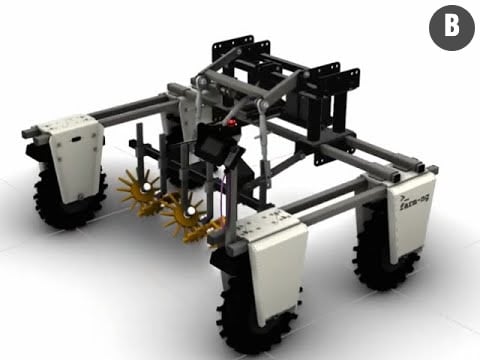
Some of the current commercial agribots are equipped with three-point hitch systems to carry multiple agricultural implements (rods, finger weeders, furrow openers, planters, transplanters, etc.; Figure 2). In comparison with conventional operations—which might use a human, a machine, and an implement—agribots bring these three components into one solution. This also makes them a highly flexible solution, for example, able to work at any time of day.

Weeding
Organic production is a prime example of an agribot application on specialty crops. In organic fields, where synthetic chemical herbicides are not allowed, growers rely on mechanical and thermal weeding. Traditionally, mechanical weeding involves tools like rods, finger weeders, and hoes, and also manual labor. For thermal weeding, fire is used, though it is often limited to off-season applications to avoid damaging the commercial crops.
However, agribots equipped with AI-powered weed control solutions can be used for in-season weed control. Current systems use “green-on-green” technology, an advanced AI-driven system that detects and differentiates weeds from crops of similar color and appearance, ensuring that only the weeds are eliminated. Some agribots are equipped with laser weeders, which use lasers to precisely target and burn weeds in real time. Other robots are equipped with “smart implements” (blades, field hoes, etc.) that mechanically remove the unwanted plants from the fields. Figure 3 illustrates examples of both systems.


Spraying
Robotic spraying is also a trend in the market. Several robots are equipped with air-assisted or boom sprayers, enabling them to spray a vast majority of specialty crops. These systems can also be embedded with “green-on-green” technologies, which target-spray only the areas where a weed is detected. An example of a spraying robot, along with a visual of the computer vision for identifying and spraying the weeds, is shown in Figure 4.


Harvesting
Harvesting robots have the potential to transform the way fruits and vegetables are harvested. As shown in Figure 5, these smart machines automatically detect and harvest produce without causing damage or contamination. They use AI to identify only the ripe fruits and vegetables in commercial fields and orchards. Once a harvest-ready crop is detected, a robotic arm—equipped with tools such as blades or mechanical fingers—gently picks it, ensuring that only the perfectly mature product is collected.


If the crop does not support full automation for harvesting, payload-carrying robots can still ease the harvesting process by transporting the harvested produce. This allows field workers to concentrate solely on picking the crop. These robots come equipped with navigation systems that let users either design routes to match the crop rows or enable a “follow-me” mode, where the robot follows a field worker across the field. Figure 6 illustrates these support systems in action.


Data Collection
Data collection and field surveillance are key roles of agricultural robots. As these machines traverse the fields, they gather detailed information at the plant level. For instance, robots equipped with multispectral sensors can measure the reflected light from leaves, creating indices that help determine nitrogen and chlorophyll levels. In addition, many robots can “scout” the field using conventional full-color 3-D cameras to capture data such as plant height, canopy size, density, and the number of plants. This information is crucial for growers to make informed decisions on irrigation, fertilization, replanting, and other management practices.
What Are the Current Applications and Models on the Market?
To better understand the current state of robotics applied to specialty crops, the Precision Horticulture Lab performed a scientific literature review to understand where research is being focused and where current commercial robots are being applied (Barbosa et al., 2024).
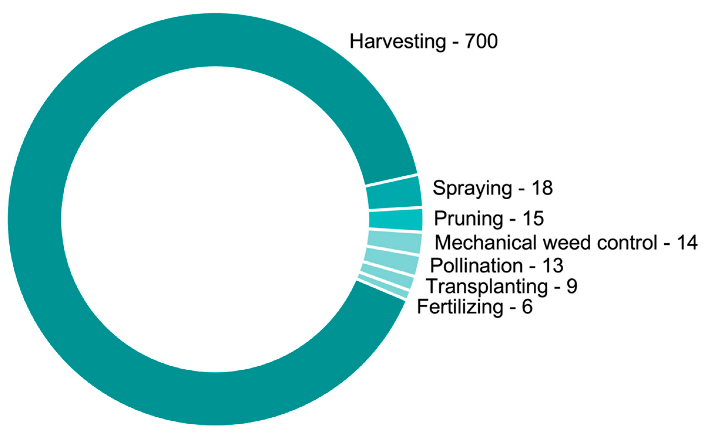
Numerous studies (763) have focused on agricultural robots for specialty crops, particularly for harvesting operations (Figure 7). This great interest is likely attributable to the labor-intensive nature of harvesting and the need to guarantee the health and quality of fruits and vegetables. Applications such as pruning, mechanical weeding, pollination, and transplanting have also drawn researchers’ attention.
Our studies also found that a growing number of companies and industry leaders have become involved in the development of agricultural robotics in the past few years. The developing market revealed that the crop robotics landscape in 2024 was comprised of nearly 350 different companies working in the segment (Figure 8) compared with nearly 250 in 2022.
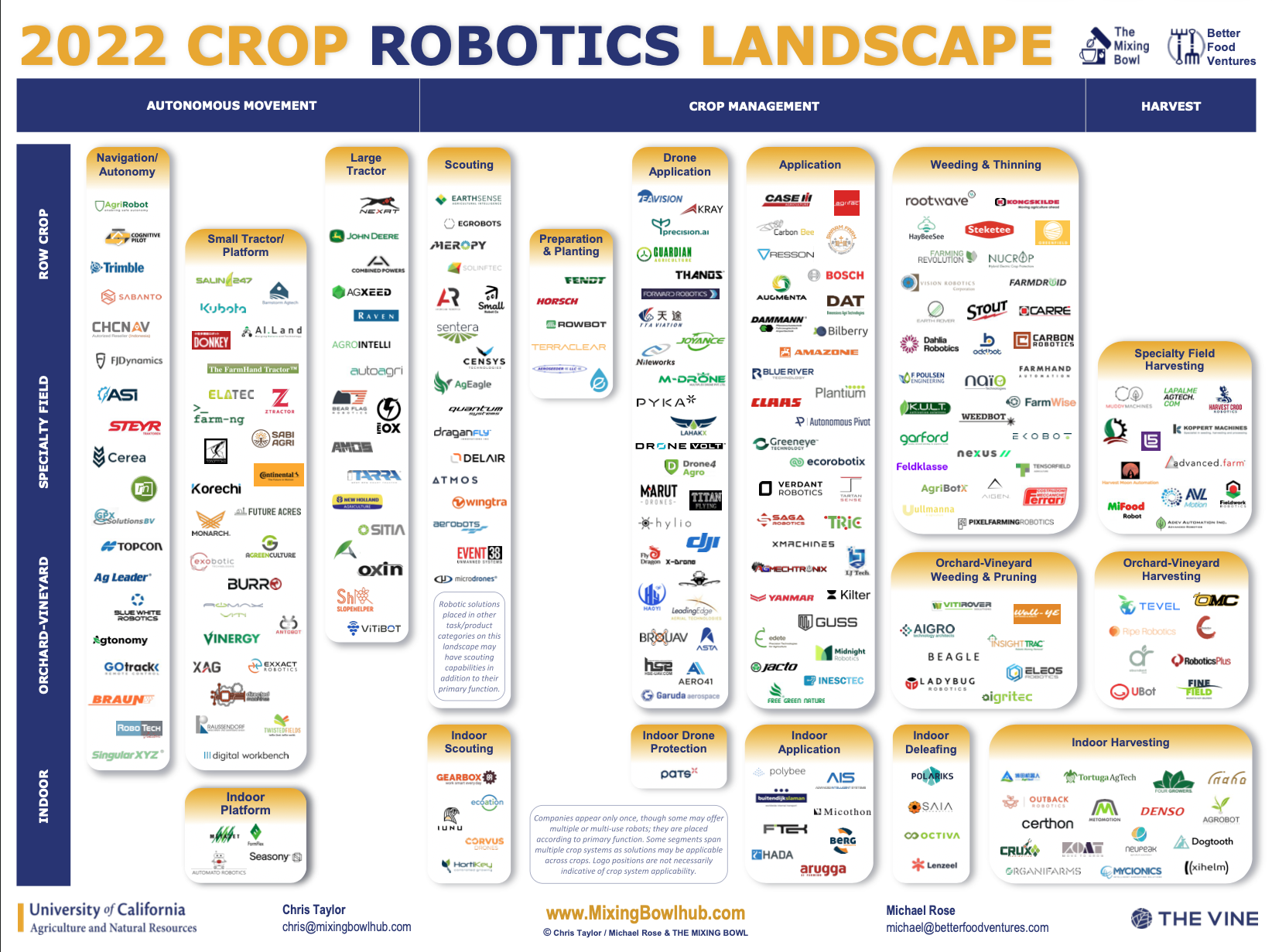
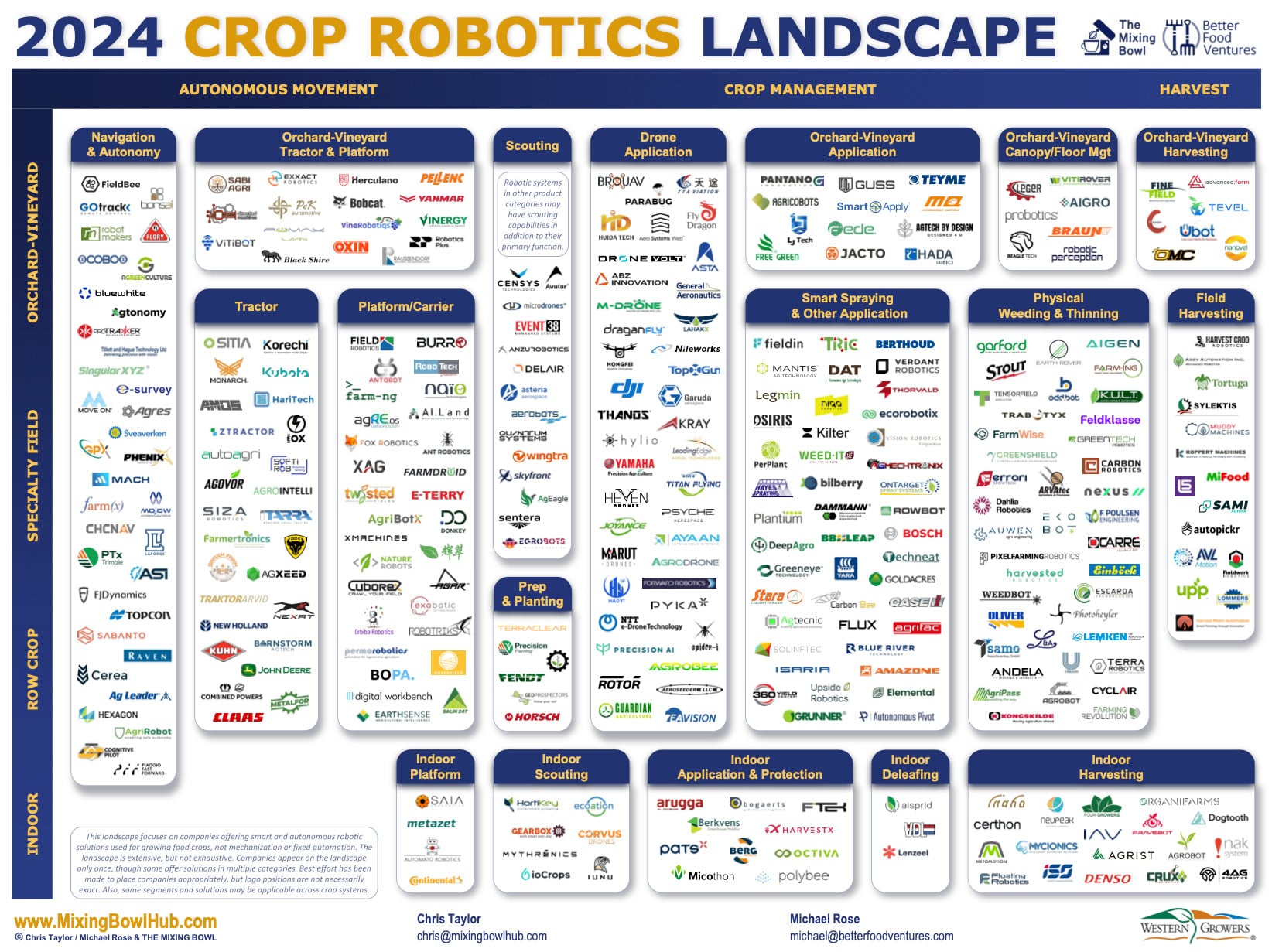
Figure 8. Comparison of the 2022 and 2024 Crop Robotics Landscape. Graphics: betterfoodventures.com and www.mixingbowlhub.com.
Many of these companies and startups are based in the United States, with notable concentrations in the Midwest and Pacific regions. These companies are focusing on products adapted to various agricultural operations, including technologies based on autonomous guidance, weed and disease detection, fruit counting, spot spraying of weeds, and autonomous fruit harvesting, among others.
Current U.S. Laws and Regulations Regarding Agricultural Robotics
In general, since these new technologies are rapidly evolving, regulators are still adapting existing frameworks to better accommodate the unique challenges of robotics. The Occupational Safety and Health Administration (OSHA) states that “there are currently no specific OSHA standards for the robotics industry.” However, OSHA’s standards ensure safe interactions between humans and machinery.
In agricultural settings, robotic systems (whether drones or ground equipment) must comply with workplace safety guidelines to protect workers. Some states will have their OSHA-approved plans, and other states (as is the case in Georgia) follow federal-level rules. Several states’ departments of transportation, highway safety, and motor vehicles are currently overseeing agricultural robotics regulations, which fall into the current regulations for autonomous cars.
At the international level, the International Standardization Organization (ISO) has developed several standards for robotics that—while not exclusively designed for agriculture—provide a critical foundation for agricultural robots. ISO 8373 defines vocabulary and general concepts for robots and robotic devices. Moreover, ISO 10218 specifies safety requirements for industrial robots, which can serve as a reference point for adapting safety protocols to agricultural robots.
Future Prospects and Conclusions
Despite the countless advantages agricultural robots offer, one question arises: Is it worth investing in these technologies? Research and field applications have proven that agricultural robots can perform various tasks in the fields that maintain crop quality, which is an important advancement in addition to manual and traditional machinery work (Shockley et al., 2019; Lowenberg-DeBoer et al., 2020; Sorensen et al., 2005; Pedersen et al., 2006, 2017).
These studies also stated that the use of robots is cost-effective. However, there are some factors to consider before adopting these technologies, including the total cost of investment in obtaining a robot, its applicability, ease of use, maintenance, and lifespan, among others. Furthermore, the payback period of the capital investment can vary depending on factors such as crop, operation, intensity of use, and applications.
The baseline price for an agricultural robot (payload, multipurpose, etc.) is around $20,000 (in USD). This price can exceed $400,000 depending on the size and specialty of the robot (harvesting, weeding, pruning, etc.). The current cost of these machines can be easily justified for large operations by the cutting-edge sensors and complex AI algorithms integrated into their systems, and their ability to perform complex field tasks. However, these high prices limit the commercialization of robots for small- and medium-scale growers, where these technologies could help the most.
Industry, research institutions, and Extension programs are currently exploring agribots’ applications to provide end users with important information on where, when, and how to use these technologies. Ongoing projects are being developed through the Institute for Integrative Precision Agriculture (IIPA) at the University of Georgia, focusing on applied research in robotics and automation to support Georgia’s crop production.
Luan Oliveira’s Precision Horticulture Lab is integrating a range of commercial robots to assist with tasks such as spraying, mowing, payload carrying, and proximal remote data acquisition. Currently, the Precision Horticulture Lab is evaluating relevant robotic systems that perform operations such as weeding, spraying, scouting, and harvesting. If you are interested in the current platforms we are evaluating, please reach out to luan@uga.edu.
The challenges we face in integrating these technologies into the fields are typical of those when adopting any new technology. Initially, we need to understand the problem and then explore how robots can address it. If our prospects hold, specialty crop fields will soon fully benefit from the application of robots from the initial to final stages, operating autonomously, precisely, and accurately, and providing information in real time.
References
Barbosa Júnior, M. R., Santos, R. G. D., Sales, L. D. A., & Oliveira, L. P. D. (2024). Advancements in agricultural ground robots for specialty crops: An overview of innovations, challenges, and prospects. Plants, 13(23), 3372. https://doi.org/10.3390/plants13233372
International Organization for Standardization. (2021). Robotics — Vocabulary (3rd ed., ISO 8373:2021). https://www.iso.org/standard/75539.html
International Organization for Standardization. (2025). Robotics — Safety requirements: Part 2: Industrial robot applications and robot cells (2nd ed., ISO 10218-2:2025). https://www.iso.org/standard/73934.html
Lowenberg-DeBoer, J., Huang, I. Y., Grigoriadis, V., & Blackmore, S. (2020). Economics of robots and automation in field crop production. Precision Agriculture, 21, 278–299. https://doi.org/10.1007/s11119-019-09667-5
Pedersen, S. M., Fountas, S., Have, H., & Blackmore, B. S. (2006). Agricultural robots—System analysis and economic feasibility. Precision Agriculture, 7, 295–308. https://doi.org/10.1007/s11119-006-9014-9
Pedersen, S. M., Fountas, S., Sørensen, C. G., Van Evert, F. K., & Blackmore, B. S. (2017). Robotic seeding: Economic perspectives. In S. Pedersen, & K. Lind (Eds.), Precision agriculture: Technology and economic perspectives (pp. 167–179). Springer Nature. https://doi.org/10.1007/978-3-319-68715-5_8
SAE International. (2021, May 3). SAE Levels of Driving Automation™ refined for clarity and international audience. https://www.sae.org/blog/sae-j3016-update
Shockley, J. M., Dillon, C. R., & Shearer, S. A. (2019). An economic feasibility assessment of autonomous field machinery in grain crop production. Precision Agriculture, 20, 1068–1085. https://doi.org/10.1007/s11119-019-09638-w
Sørensen, C. G., Madsen, N. A., & Jacobsen, B. H. (2005). Organic farming scenarios: Operational analysis and costs of implementing innovative technologies. Biosystems Engineering, 91(2), 127–137. https://doi.org/10.1016/j.biosystemseng.2005.03.006